Лента новостей
адаптивная робототехника для исследований, взаимодействие с роботами в реальном времени, разработка робототехники для производства, роботизированная рука для реабилитации, робототехника и телеуправление, создание адаптивных систем управления, управление роботами в удаленных местах
I ROBOT
0 Комментарии
Управление роботами с помощью игровых контроллеров и кукловодов становится реальностью
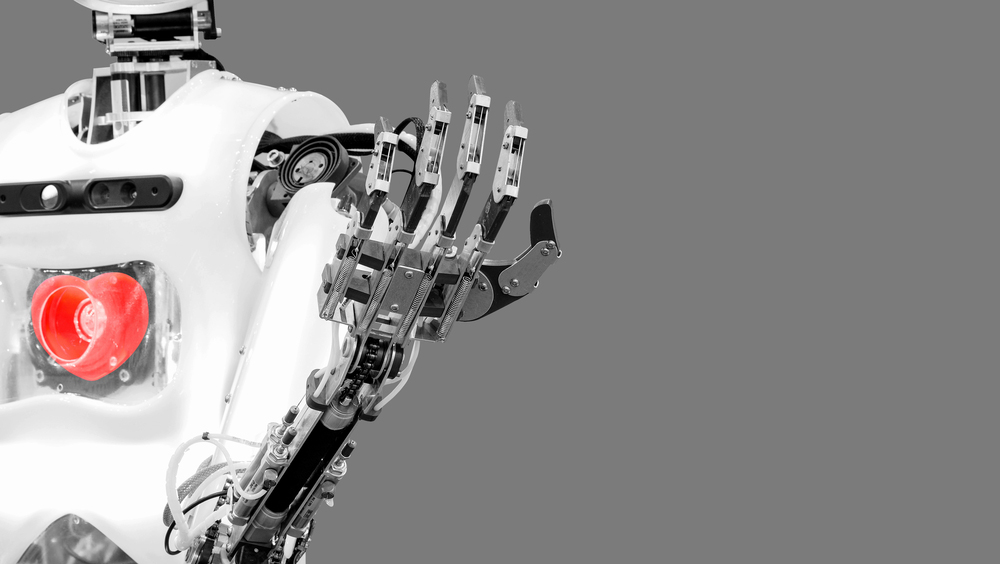
Представьте, что вы можете управлять роботизированной рукой для реабилитации с помощью обычного игрового контроллера или даже специального кукловода. Это становится возможным благодаря платформе PARPLE, разработанной исследователями из лаборатории KIMLAB. Эта система позволяет гибко переключаться между устройствами управления и роботами, обеспечивая обратную связь в реальном времени.
Одна из ключевых особенностей PARPLE — модульность. Это означает, что можно подключать к роботу разные типы манипуляторов и управлять ими через различные устройства, от VR-шлемов до джойстиков. Например, вы можете использовать VR-интерфейс, такой как Meta Quest 2, для управления роботами в удаленных местах. Система адаптируется под разные задачи и стили движения, что делает ее очень гибкой.
PARPLE использует два компонента: устройство управления и робота-исполнителя. Если устройство управления и робот имеют схожую конструкцию, система работает в режиме совместного пространства, где движения копируются напрямую. Например, если вы сгибаете «локоть» на управляющем устройстве, роботизированная рука выполнит точно такое же движение. Это особенно полезно для создания адаптивных систем управления, которые могут менять свою конфигурацию в зависимости от задачи и окружающей среды.
Одной из интересных возможностей PARPLE является обратная связь в реальном времени. Система передает тактильную обратную связь, помогая избежать неудобных положений и обеспечивая контроль над роботом. Например, если робот сталкивается с препятствием, пользователь чувствует сопротивление, сигнализирующее о том, что дальше двигаться нельзя. Это особенно важно для взаимодействия с роботами в реальном времени, когда каждая секунда на счету.
Эта технология имеет большой потенциал для использования в различных областях, таких как разработка робототехники для производства, реабилитация и исследовательские миссии. Например, PARPLE может помочь людям с ограниченной подвижностью выполнять задачи с помощью роботизированных рук. Кроме того, система может быть использована в производстве для выполнения сложных задач, требующих высокой точности и гибкости.
В целом, PARPLE — это важный шаг к созданию более интуитивных систем робототехники и телеуправления и адаптивной робототехники для исследований. С ее помощью исследователи могут экспериментировать, собирать данные для обучения ИИ и быстро менять сценарии управления без полной перенастройки оборудования. Это открывает широкие возможности для развития робототехники и ее применения в различных областях.
Больше новостей в нашем телеграм канале I ROBOT












Отправить комментарий